Nell’ambito della manifestazione RomeCup2024 Intelligenza artificiale e robotica, ideata dalla Fondazione Mondo Digitale e realizzata in collaborazione conl’Università degli Studi di Roma Tor Vergata, la Macroarea di Ingegneria ha organizzato attività di Orientamento e Talk a carattere scientifico. L’edizione 2024, che si è tenuta il 20 e 21 marzo all’Università di Tor Vergata, è stata dedicata all’innovazione tecnologica basata su soluzioni robotiche e di intelligenza artificiale a servizio della sostenibilità. L’ evento è stato anche l’occasione per celebrare la Giornata Nazionale delle Università,il 20 marzo, dedicata al sapere e all’istruzione e proposta dalla CRUI, la Conferenza dei Rettori delle Università Italiane.
“RomeCup2024 delle Università è un evento per i ragazzi e per le ragazze, un’occasione per avere un’avventura di estremo interesse industriale, conoscere un’area che è il futuro e cimentarsi in tantissime sfide”. RomeCup 2024: il messaggio di Daniele Carnevale, professore associato di Controlli automatici, agli studenti, raccolto da Fondazione Mondo Digitale – guarda ilvideo
Eventi come la RomeCup aiutano a spostare il punto di vista degli studenti in formazione da spettatori ad attori. Tre domande di Fondazione Mondo Digitale per Massimiliano Caramia, coordinatore della Macroarea di Ingegneria dell’Università degli Studi di Roma Tor Vergata che quest’anno ospita la RomeCup 2024. – La RomeCup 2024 vista da Massimiliano Caramia – guarda ilvideo
Nella seconda giornata della RomeCup 2024, la manifestazione dedicata all’Intelligenza artificiale e alla robotica, si è svolta presso la Macroarea di Ingegneria dell’Università Roma Tor Vergata la premiazione delle scuole finaliste che hanno partecipato ai contest creativi della robotica. La competizione prevedeva sei categorie: AGROBOT, COBOT, MAREBOT, TIRBOT, 5GBOT alle quali, da quest’anno, si è aggiunta la nuova categoria DRONEBOT.
Crediti immagini: Pamela Pergolini
«I contest rappresentano un momento. di incontro fra scuole e università per promuovere e rafforzare il lavoro collaborativo tra giovani studenti e team di ricercatori», hanno sottolineato da Fondazione Mondo Digitale, ideatrice dell’intera manifestazione RomeCup, realizzata in collaborazione, tra gli altri, con l’Università Roma Tor Vergata.
Un momento di incontro che vuole far conoscere ai ragazzi e ragazze il mondo dell’automazione e interessarli a un percorso ingegneristico da intraprendere dopo la maturità, in particolare nell’ambito dell’Automazione e controllo, dove il mondo del lavoro offre molte opportunità, come ha sottolineato Daniele Carnevale, professore di Automazione e controllo a Ingegneria Tor Vergata, che ha aperto l’evento di premiazione in Aula convegni: «i nostri ragazzi trovano lavoro prima di finire la laurea. Venite, mettetevi alla prova, studiate con passione e in modo serio. C’è tantissimo lavoro in questo settore, soprattutto nelle sfide di tecnologia applicativa nel sociale».
Un panel di esperti ha valutato i progetti e selezionato i finalisti che sono arrivati al RomeCup2024, da diverse regioni d’Italia, per partecipare al pitch contest finale. Studenti e studentesse delle scuole, che hanno lavorato ad attività laboratoriali durante tutto l’anno scolastico, hanno presentato i loro progetti, e la realizzazione di un prototipo funzionante e/o eventuale interfaccia software, in un elevator pitch, della durata massima di 3 minuti, I ragazzi e le ragazze hanno descritto le principali caratteristiche, fattibilità e analisi di mercato. Progetti e prototipi sono stati valutati secondo i seguenti criteri: impatto, basso costo, efficacia, originalità e interdisciplinarità. Quest’anno alla competizione hanno preso parte 23 team provenienti da 17 istituti secondari di II grado, in Italia, che hanno lavorato con 11 atenei italiani.
CONTEST di ROBOTICA RomeCup2024 – Ingegneria Università Roma Tor Vergata
Categorie e vincitori:
AGROBOT – 1°classificato Liceo Bertrand Russell di Cles (Trento) – Applicazioni robotiche per l’agricoltura
TIRBOT – 1°classificato ITT Panella Vallauri, Reggio Calabria -Applicazioni robotiche per veicoli autonomi
MAREBOT – 1°classificato Liceo Scientifico Keplero di Roma – Applicazioni robotiche marine
5GBOT – 1°classificato IIS Marconi di Civitavecchia (Roma) -Applicazioni robotiche che usano la rete 5G
DRONE BOT – la nuova categoria quest0anno in gara – 1°classificato Liceo Scientifico Vito Volterra di Ciampino (Roma) Intelligenza artificiale e robotica applicate all’ambito dei sistemi senza pilota
MENZIONI SPECIALI GIURIA – DRONEBOT:
Istituto Edoardo Amaldi di Roma per la tecnica di costruzione con materiali riciclati e la modularità del rover
La 17ª edizione di RomeCup 2024 dal titolo “Intelligenza artificiale e robotica per la sfida della sostenibilità olistica”, è stata inaugurata il 20 marzo all’Università degli Studi Roma Tor Vergata presso la Macroarea di Ingegneria, In programma convegni, incontri di Orientamento dedicati agli studenti delle scuole superiori (previste 4000 presenze nelle due giornate del 20 e 21 marzo a Tor Vergata), aree dimostrative con l’esposizione prototipi di università, scuole, aziende, startup e centri di ricerca, gare di robotica, laboratori didattici, un ciclo di Talk scientifici di Ingegneria Tor Vergatasu temi della ricerca, innovazione e sostenibilità.
Crediti immagini: Pamela Pergolini
L’ evento è stato l’occasione per celebrare anche la Giornata Nazionale delle Università,il 20 marzo, dedicata al sapere e all’istruzione, proposta dalla CRUI, la Conferenza dei Rettori delle Università Italiane. L’ edizione 2024 si è aperta al pubblico con l’area dimostrativa nella quale sono stati esposti i prototipi di scuole, centri di ricerca, università, aziende e startup, con le gare di robotica, i contest universitari ei laboratori didattici rivolti alle scuole.
Ad aprire la RomeCup 2024, mercoledì 20 marzo, ore 10:00, il convegno “Le frontiere della conoscenza per il benessere dell’uomo e del pianeta” (Aula Convegni, Edificio della didattica, Macroarea Ingegneria). Nel pomeriggio, sempre presso la Macroarea di Ingegneria dell’Università degli Studi di Roma Tor Vergata, dalle 14:30 alle 16:00, il “Talk sulle sfide della sostenibilità olistica” . Ha moderato gli incontri Riccardo Luna, conduttore e direttore di Italian Tech.
La manifestazione ha visto, sempre a Ingegneria Tor Vergata (Aula Convegni, Edificio della didattica) nella mattinata di giovedì 21 marzo, il convegno “I progetti al fianco delle aziende”. La premiazione dei vincitori delle gare di robotica si tiene venerdì 22 marzo in Campidoglio, presso la Sala Laudato Sì e la Sala della Protomoteca.
La RomeCup 2024 è promossa dalla Fondazione Mondo Digitale ETS e dal Gruppo di Automazione e Robotica di Ingegneria Roma Tor Vergata, in collaborazione con Italian tech e Gruppo GEDI ed è patrocinata da Regione Lazio, Roma Capitale, Unindustria e Siri.
Per il secondo anno è stato indetto il Premio, pari a 20.000 Euro, al miglior ricercatore in ambito robotica e intelligenza artificiale.
L’edizione 2023 dell’International Conference on Control, Automation and Diagnosis (ICCAD) si terrà dal 10 al 12 maggio a Roma presso la Macroarea di Ingegneria dell’Università di Roma “Tor Vergata”. La conferenza ICCAD, partita da Hammamet (2017), è poi approdata a Marrakech (2018), Grenoble (2019 e 2021), Parigi (2020), Lisbona (2022) e, ora, nel 2023 la settima edizione arriva a Roma. La conferenza è l’occasione per presentare risultati di ricerca e nuove sfide nel campo dell’automazione, ovvero del trasferimento alle macchine di operazioni di governo e controllo di dispositivi, processi e sistemi di diversa natura. Si parla di automazione ogni qualvolta un’operazione viene eseguita da una macchina senza, o con ridotto, intervento dell’uomo. Il convegno riunisce esperti dell’industria, dei governi e del mondo accademico, esperti in ingegneria, progettazione e ricerca. Il convegno affronterà aspetti sia teorici che applicativi, con particolare attenzione agli scenari di convergenza fra Intelligenza computazionale, Interazioni uomo-macchina, Metodi di intelligenza artificiale per la diagnosi, Informatica e Robotica. Tre sono le aree tematiche generali nelle quali si confronteranno i relatori provenienti, in particolare, da Nord Africa, Medio Oriente, Paesi Arabi, India ed Europa: Controlli automatici e Sistemi di controllo; Diagnosi ed isolamento dei guasti; Sistemi robotici
IL FUTURO DELLA RICERCA NELL’ AUTOMAZIONE Per le comunità accademiche e industriali ICCAD 2023 è una straordinaria opportunità di condividere soluzioni e discutere le future direzioni di ricerca nel campo dell’automazione. «L’automazione è un settore in fortissima espansione, come dimostra anche l’altissima richiesta di ingegneri dell’automazione con competenze avanzate negli ambiti della robotica e del controllo di processi. In questo ambito l’Ateneo di “Tor Vergata” è da sempre in prima linea, se si considera che uno dei docenti fondatori dell’ateneo, il professor Salvatore Nicosia, è stato il pioniere degli studi di robotica nelle università romane», afferma il professor Sergio Galeani, coordinatore del corso di laurea magistrale inIngegneria dell’automazione presso il Dipartimento Ingegneria Civile e Ingegneria Informatica. «Lo strumento alla base dell’automazione è la teoria matematica dei sistemi e del controllo, che rende possibile studiare le caratteristiche dinamiche che regolano l’evoluzione di un qualunque sistema, naturale o artificiale, in modo sostanzialmente indipendente dal contesto applicativo, consentendo una comprensione profonda di alcuni fenomeni universalmente presenti in ogni realtà in grado di autoregolarsi», spiega il professor Galeani.
DALLA TEORIA DEI SISTEMI ALLA TEORIA DEL CONTROLLO L’automazione è per sua natura multidisciplinare e trova applicazione nei più svariati ambiti, toccando da vicino la nostra vita quotidiana: dalle semplici applicazioni presenti negli elettrodomestici (frigoriferi, lavatrici, condizionatori) alle applicazioni nel campo automobilistico (sistemi di frenatura e sterzo servoassistiti, sospensioni attive, controllo della velocità di crociera, guida autonoma), aerospaziale (piloti automatici per aerei o droni, controllo dell’orbita dei satelliti), manifatturiero, energetico, medico (robotica medica, organi artificiali), e via dicendo. «Grazie alla teoria dei sistemi – continua Galeani – tutti i sistemi di automazione possono essere studiati con la stessa metodologia matematica. La stessa metodologia consente non solo di descrivere il comportamento “spontaneo” del “sistema dinamico” considerato – che potrebbe essere un aereo, un processo industriale o economico, un robot, un ecosistema, etc. – ma permette di determinare come modulare i parametri che ne determinano il comportamento in modo da indurre un’evoluzione più desiderabile o sostenibile: questa è la genesi della teoria del controllo», aggiunge Galeani.
PRESENTAZIONI PLENARIE Oltre a numerose presentazioni nelle sessioni tecniche parallele, l’edizione di quest’anno ospiterà tre presentazioni plenarie da parte di esperti riconosciuti a livello internazionale (Maria Di Mascolo (CNRS, Francia) illustrerà i metodi per rendere più efficienti i sistemi di produzione nell’ambito biomedico; Carlo Cecati (Università de L’Aquila) descriverà dei metodi analitici per la modulazione nei convertitori di potenza; Bernard Brogliato (INRIA, Francia) parlerà di metodi impliciti per la discretizzazione di controllori sliding-mode) e due presentazioni semi-plenarie da parte di due giovani brillanti accademici (Thulasi Mylvagana, Imperial College London, mostrerà l’applicazione della teoria dei giochi differenziali al controllo automatico, ad esempio per evitare collisioni in sistemi multi-agente; Corrado Possieri, Università di Roma “Tor Vergata”, spiegherà l’utilizzo di tecniche di geometria algebrica per la robotica e la teoria del controllo).
ICCAD’23 è organizzata dall’Associazione tunisina per la tecnologia e lo sviluppo sostenibile (ATTeDD), con la sponsorizzazione tecnica di IEEE Systems, Man and Cybernetics Society, Polytech Grenoble e IEEE Society.
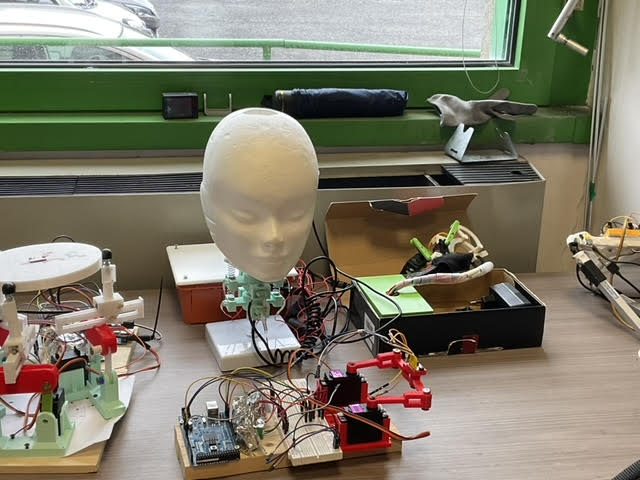
Il LARM2- Laboratorio di Robotica e Meccatronica, fondato nel 1990 all’Università di Cassino sotto la guida del professor Marco Ceccarelli, oggi ha sede presso il Dipartimento di Ingegneria Industriale dell’Università di Roma “Tor Vergata e si occupa di progettazione, analisi e sviluppo di robot e dispositivi intelligenti per migliorare la nostra vita quotidiana, dai robot di servizio a basso costo ai sensori medici. Il Laboratorio, diretto sempre dal prof. Ceccarelli, in questi 30 anni ha ospitato oltre cento studenti provenienti da tutto il mondo: Sud America, Asia, Africa, Nord America, Europa, Russia, come Messico, USA, Kazakhstan, Cina, Giappone, oltre che dai paesi europei costruendo nel tempo una rete internazionale, nell’ambito della quale avvengono continui scambi di attività pratiche di laboratorio. Al momento collaborano alle attività di ricerca del LARM2, come studenti di dottorato, Jorge Araque, 32 anni, colombiano, Aleksandr Titov, 28 anni, di russo, e Wenshuo Gao, cinese, 26 anni. Sia Jorge che Aleksandr lavorano su robot per aerospazio: Jorge ha partecipato attivamente alla ricerca su TORVEastro, un robot disegnato per assistere gli astronauti in operazioni di ispezione e manutenzione sulla stazione spaziale internazionale (ISS), Aleksandr sta progettando un manipolatore robotico (braccio e mano) per operazioni di “berthing” (recupero) di satelliti. Wenshuo invece sta lavorando alla progettazione di un torso per un robot umanoide, il LARMbot 2, su cui il professor Ceccarelli lavora da diversi anni e alla realizzazione del quale ha collaborato anche il prof. Matteo Russo, progettandone le gambe durante il suo dottorato a “Tor Vergata”, in parte svolto presso il Tokyo Institute of Technology. «Le materie che si possono studiare a ingegneria “Tor Vergata” e che si collegano alla ricerca che conduciamo nel laboratorio, – spiega il professor Ceccarelli – includono la cinematica dei robot, la dinamica multi-corpo, la progettazione di robot, i robot di servizio, sistemi robotici per applicazioni medicali medici e di riabilitazione e la storia dei meccanismi e della scienza delle macchine».
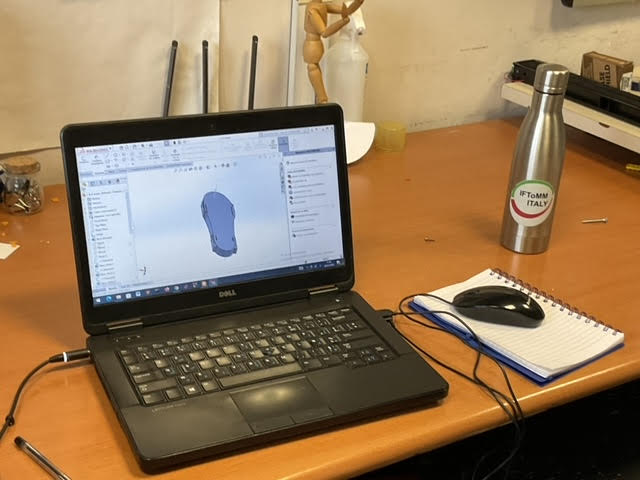
LARMbot 2, IL ROBOT UMANOIDE Il progetto meccanico LARMbot 2 è un robot umanoide a basso costo orientato all’utente, caratterizzato da architetture parallele sia per il busto che per le gambe. Esiste già un prototipo, con i dettagli costruttivi dei suoi sottosistemi e le sue specifiche tecniche. Per caratterizzare le prestazioni del robot proposto, sono stati presentati risultati sperimentali sia per le operazioni di deambulazione che di sollevamento pesi.
LA COSTRUZIONE DEL PROTOTIPO LARMbot2 è stato concepito come un robot umanoide a basso costo, pertanto è stato progettato per essere prodotto con parti strutturali tramite stampa 3D, controllato da schede commerciali e azionato da servomotori commerciali e attuatori lineari. Il costo di tutti i componenti per il prototipo finale è inferiore a 2000 €. LARMbot2 è caratterizzato da tre principali sottosistemi meccanici, ovvero locomozione, manipolazione e busto. Il sottosistema di locomozione è composto da due unità di gambe identiche. Ciascuna gamba è caratterizzata da una struttura ibrida con un meccanismo parallelo che collega l’anca alla caviglia, replicando l’architettura di una gamba, nella quale muscoli agonisti e antagonisti generano moto contraendosi e allungandosi in opposizione. Un secondo motore è posto sulla caviglia per raggiungere l’equilibrio durante le operazioni di deambulazione reagendo meglio ai disturbi sul piano frontale. «La camminata umana – racconta Ceccarelli – è stata studiata sviluppando un progetto meccanico per un robot bipede che cammina. I sistemi di deambulazione sono studiati in termini di cinematica, dinamica e controllo attraverso diversi sistemi meccanici. Vengono studiati gli aspetti meccanici e la programmazione della manipolazione delle robotizzazioni industriali con l’obiettivo di migliorare le applicazioni industriali esistenti e sviluppare nuove soluzioni di produzione. La meccanica delle manipolazioni robotizzate – conclude il professore – viene indagata anche con simulazioni sperimentali e sviluppo di opportuni dispositivi per end-effector e sistemi di test. Si studiano soluzioni a basso costo per applicazioni orientate all’utente».
TORVEastro, IL ROBOT ASTRONAUTA È un robot a tre arti, che sono in grado di funzionare come braccia e gambe, costruito con la finalità di aiutare gli astronauti nelle operazioni di manutenzione e supervisione delle infrastrutture esterne della stazione spaziale orbitale. Il prototipo sarà finalizzato entro la primavera del 2023 e verrà presentata una demo che ne illustrerà tutte le funzioni, sarà realizzato per resistere non solo alle alte temperature esterne alla stazione spaziale internazionale ma anche alla spazzatura spaziale che ad alta velocità rischia di perforare le tute degli astronauti. Il progetto vede la collaborazione tra il laboratorio di Robot Meccatronica di “Tor Vergata” e il laboratorio di Robotica e Intelligenza Artificiale del Dipartimento Tecnologie Energetiche e Fonti Rinnovabili dell’ENEA, l’Agenzia nazionale per le nuove tecnologie, l’energia e lo sviluppo economico sostenibile.
IL FUTURO DI TORVEastro Il prototipo servirà a progettare un robot astronauta per attività EVA (Extra-Vehicular-Activity) di servizio su stazioni orbitali per operazioni di manutenzione e monitoraggio esterno alle strutture della stazione orbitale. «La validazione di un prototipo dimostratore – ci dice il professor Ceccarelli – è uno dei risultati finali previsti dal progetto. Il progetto TORVEastro prevede attività di progettazione e sviluppo di soluzioni sia per ambienti nello spazio orbitale sia per sperimentazioni in laboratorio a gravità terrestre, al fine di concretizzare l’idea brevettuale già collaudata concettualmente con un piccolo prototipo». Oltre ai robot di “servizio”, nel quale rientrano sia l’umanoide che i robot spaziali, nel laboratorio di “Tor Vergata” vengono sviluppati robot, sensori e sistemi medici per diagnosi, assistenza e riabilitazione, attraverso l’uso di esoscheletri low-cost “stampabili in 3D a prezzi ridotti- spiega il professor Ceccarelli – estremamente leggeri per comfort se indossati e spesso attivati tirando o rilasciando cavi, e sistemi di monitoraggio, con recenti applicazioni sperimentali sulla respirazione tramite sensori indossabili”.
LA RIABILITAZIONE E LA DIAGNOSTICA MEDICA Vari sono i progetti in campo dei dispositivi medicali in fase di sviluppo e completamento come il sistema L-CADEL per l’assistenza motoria del gomito con estensione ad una nuova struttura per la caviglia, e lo strumento RESPIRholter per il monitoraggio della respirazione con caratterizzazioni numeriche della biomeccanica utili alla diagnostica medica.
LARM2: Laboratory of Robot Mechatronics Sito web: https://larm2.ing.uniroma2.it/ Dipartimento di Ingegneria industriale Università di Roma “Tor Vergata” Direttore del Laboratorio LARM2: prof. Marco Ceccarelli, http://orcid.org/0000-0001-9388-4391 Specially Appointed Professor at Intern. Research Frontiers Initiative of Tokyo Institute of Technology
L’articolo è stato realizzato con la collaborazione di Federica Trisolino