LARM2
di Pamela Pergolini
Il LARM2- Laboratorio di Robotica e Meccatronica, fondato nel 1990 all’Università di Cassino sotto la guida del professor Marco Ceccarelli, oggi ha sede presso il Dipartimento di Ingegneria Industriale dell’Università di Roma “Tor Vergata e si occupa di progettazione, analisi e sviluppo di robot e dispositivi intelligenti per migliorare la nostra vita quotidiana, dai robot di servizio a basso costo ai sensori medici. Il Laboratorio, diretto sempre dal prof. Ceccarelli, in questi 30 anni ha ospitato oltre cento studenti provenienti da tutto il mondo: Sud America, Asia, Africa, Nord America, Europa, Russia, come Messico, USA, Kazakhstan, Cina, Giappone, oltre che dai paesi europei costruendo nel tempo una rete internazionale, nell’ambito della quale avvengono continui scambi di attività pratiche di laboratorio. Al momento collaborano alle attività di ricerca del LARM2, come studenti di dottorato, Jorge Araque, 32 anni, colombiano, Aleksandr Titov, 28 anni, di russo, e Wenshuo Gao, cinese, 26 anni. Sia Jorge che Aleksandr lavorano su robot per aerospazio: Jorge ha partecipato attivamente alla ricerca su TORVEastro, un robot disegnato per assistere gli astronauti in operazioni di ispezione e manutenzione sulla stazione spaziale internazionale (ISS), Aleksandr sta progettando un manipolatore robotico (braccio e mano) per operazioni di “berthing” (recupero) di satelliti. Wenshuo invece sta lavorando alla progettazione di un torso per un robot umanoide, il LARMbot 2, su cui il professor Ceccarelli lavora da diversi anni e alla realizzazione del quale ha collaborato anche il prof. Matteo Russo, progettandone le gambe durante il suo dottorato a “Tor Vergata”, in parte svolto presso il Tokyo Institute of Technology. «Le materie che si possono studiare a ingegneria “Tor Vergata” e che si collegano alla ricerca che conduciamo nel laboratorio, – spiega il professor Ceccarelli – includono la cinematica dei robot, la dinamica multi-corpo, la progettazione di robot, i robot di servizio, sistemi robotici per applicazioni medicali medici e di riabilitazione e la storia dei meccanismi e della scienza delle macchine».
LARMbot 2, IL ROBOT UMANOIDE
Il progetto meccanico LARMbot 2 è un robot umanoide a basso costo orientato all’utente, caratterizzato da architetture parallele sia per il busto che per le gambe. Esiste già un prototipo, con i dettagli costruttivi dei suoi sottosistemi e le sue specifiche tecniche. Per caratterizzare le prestazioni del robot proposto, sono stati presentati risultati sperimentali sia per le operazioni di deambulazione che di sollevamento pesi.
LA COSTRUZIONE DEL PROTOTIPO
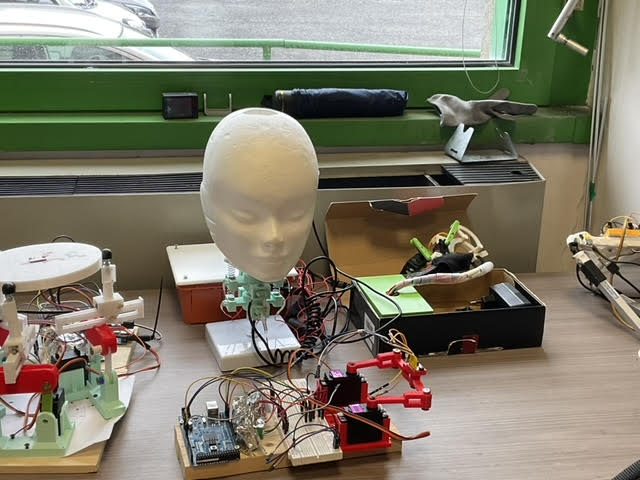
LARMbot2 è stato concepito come un robot umanoide a basso costo, pertanto è stato progettato per essere prodotto con parti strutturali tramite stampa 3D, controllato da schede commerciali e azionato da servomotori commerciali e attuatori lineari. Il costo di tutti i componenti per il prototipo finale è inferiore a 2000 €.
LARMbot2 è caratterizzato da tre principali sottosistemi meccanici, ovvero locomozione, manipolazione e busto. Il sottosistema di locomozione è composto da due unità di gambe identiche. Ciascuna gamba è caratterizzata da una struttura ibrida con un meccanismo parallelo che collega l’anca alla caviglia, replicando l’architettura di una gamba, nella quale muscoli agonisti e antagonisti generano moto contraendosi e allungandosi in opposizione. Un secondo motore è posto sulla caviglia per raggiungere l’equilibrio durante le operazioni di deambulazione reagendo meglio ai disturbi sul piano frontale. «La camminata umana – racconta Ceccarelli – è stata studiata sviluppando un progetto meccanico per un robot bipede che cammina. I sistemi di deambulazione sono studiati in termini di cinematica, dinamica e controllo attraverso diversi sistemi meccanici. Vengono studiati gli aspetti meccanici e la programmazione della manipolazione delle robotizzazioni industriali con l’obiettivo di migliorare le applicazioni industriali esistenti e sviluppare nuove soluzioni di produzione. La meccanica delle manipolazioni robotizzate – conclude il professore – viene indagata anche con simulazioni sperimentali e sviluppo di opportuni dispositivi per end-effector e sistemi di test. Si studiano soluzioni a basso costo per applicazioni orientate all’utente».
TORVEastro, IL ROBOT ASTRONAUTA
È un robot a tre arti, che sono in grado di funzionare come braccia e gambe, costruito con la finalità di aiutare gli astronauti nelle operazioni di manutenzione e supervisione delle infrastrutture esterne della stazione spaziale orbitale. Il prototipo sarà finalizzato entro la primavera del 2023 e verrà presentata una demo che ne illustrerà tutte le funzioni, sarà realizzato per resistere non solo alle alte temperature esterne alla stazione spaziale internazionale ma anche alla spazzatura spaziale che ad alta velocità rischia di perforare le tute degli astronauti. Il progetto vede la collaborazione tra il laboratorio di Robot Meccatronica di “Tor Vergata” e il laboratorio di Robotica e Intelligenza Artificiale del Dipartimento Tecnologie Energetiche e Fonti Rinnovabili dell’ENEA, l’Agenzia nazionale per le nuove tecnologie, l’energia e lo sviluppo economico sostenibile.
IL FUTURO DI TORVEastro
Il prototipo servirà a progettare un robot astronauta per attività EVA (Extra-Vehicular-Activity) di servizio su stazioni orbitali per operazioni di manutenzione e monitoraggio esterno alle strutture della stazione orbitale. «La validazione di un prototipo dimostratore – ci dice il professor Ceccarelli – è uno dei risultati finali previsti dal progetto. Il progetto TORVEastro prevede attività di progettazione e sviluppo di soluzioni sia per ambienti nello spazio orbitale sia per sperimentazioni in laboratorio a gravità terrestre, al fine di concretizzare l’idea brevettuale già collaudata concettualmente con un piccolo prototipo». Oltre ai robot di “servizio”, nel quale rientrano sia l’umanoide che i robot spaziali, nel laboratorio di “Tor Vergata” vengono sviluppati robot, sensori e sistemi medici per diagnosi, assistenza e riabilitazione, attraverso l’uso di esoscheletri low-cost “stampabili in 3D a prezzi ridotti- spiega il professor Ceccarelli – estremamente leggeri per comfort se indossati e spesso attivati tirando o rilasciando cavi, e sistemi di monitoraggio, con recenti applicazioni sperimentali sulla respirazione tramite sensori indossabili”.
LA RIABILITAZIONE E LA DIAGNOSTICA MEDICA
Vari sono i progetti in campo dei dispositivi medicali in fase di sviluppo e completamento come il sistema L-CADEL per l’assistenza motoria del gomito con estensione ad una nuova struttura per la caviglia, e lo strumento RESPIRholter per il monitoraggio della respirazione con caratterizzazioni numeriche della biomeccanica utili alla diagnostica medica.
LARM2: Laboratory of Robot Mechatronics
Sito web: https://larm2.ing.uniroma2.it/
Dipartimento di Ingegneria industriale Università di Roma “Tor Vergata”
Direttore del Laboratorio LARM2: prof. Marco Ceccarelli, http://orcid.org/0000-0001-9388-4391
Specially Appointed Professor at Intern. Research Frontiers Initiative of Tokyo Institute of Technology
L’articolo è stato realizzato con la collaborazione di Federica Trisolino